匠人匠心 至誠至精
為客戶提供滿意的儀器儀表產(chǎn)品
+86 150-7907-3353

測量原理:
導波雷達是基于時間行程原理的測量儀表,雷達波以光速運行;運行時間可以通過電子部件被轉(zhuǎn)換成物位信號。儀表測量參考點到物料表面的距離,探頭發(fā)出高頻脈沖并沿纜繩傳播,當脈沖電磁波遇到物料表面時反射回來被儀表內(nèi)的接收器接收,并將時間信號轉(zhuǎn)化為物位信號。
輸入
反射的脈沖信號沿纜繩傳遞至儀表電子線路部分,微處理器對此信號進行處理,識別出微波脈沖在物料表面所產(chǎn)生的回波。正確的回波信號由智能軟件完成識別,距離物料表面的距離D與脈沖的時間行程T成正比:
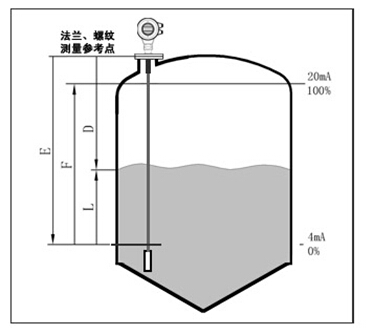
D=C×T/2
其中C為光速
因空罐的距離E已知,則物位L為:
L=E-D
輸出
通過輸入空罐高度E(=零點),滿罐高度F(=滿量程)及一些應(yīng)用參數(shù)來設(shè)定,應(yīng)用參數(shù)將自動使儀表適應(yīng)測量環(huán)境。對應(yīng)于4-20mA輸出。
主要參數(shù):應(yīng) 用:液體、固體小顆粒及粉體
測量范圍:20米(可擴展至30米)
過程連接:螺紋、法蘭
過程溫度:-20-220℃
過程壓力:-1.0-40bar
精 度:< 0.1%
分 辨 率:1mm
重 復 性:±3mm
頻率范圍:100MHZ-1.8GHZ防爆等J:Exd II BT4
防護等J:IP68
信號輸出:4…20mA/HART(兩線)
圖一:測量范圍
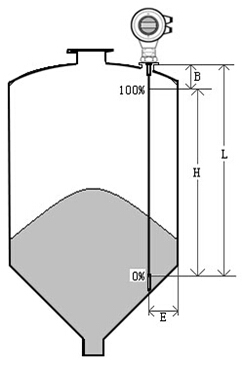
說明:
H----測量范圍
L----空罐距離
B----頂部盲區(qū)
E----探頭到罐壁的最小距離
頂部盲區(qū)是指物料Z高料面與測量參考點之間的Z小距離。
底部盲區(qū)是指纜繩Z底部附近無法精確測量的一段距離。
頂部盲區(qū)和底部盲區(qū)之間是較好測量距離。
注意: 只有物料處于頂部盲區(qū)和底部盲區(qū)之間時,才能保證罐內(nèi)物位的測量。
圖二:安裝指南
下述的安裝指南適用于纜式和桿式探頭測量固體顆粒料和液態(tài)物體,管式探頭只適用于液態(tài)物體。
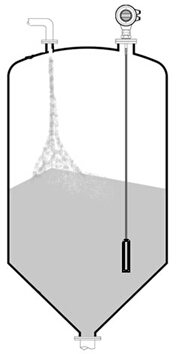
安裝位置:
盡量遠離出料口和進料口。
對金屬罐和塑料罐,在整個量程范圍內(nèi)不碰壁。如果是金屬罐,物位儀表不要安裝在罐的中央。
建議安裝在料倉直徑的1/4處。
纜式探頭或桿式探頭離罐壁Z小距離不小于50厘米。
探頭底部距罐底大約30mm。
探頭距罐內(nèi)障礙物Z小距離不小于300mm。
如果容器底部是錐型的,傳感器可以安裝
罐頂中央,這樣可以一直測量到罐底。




